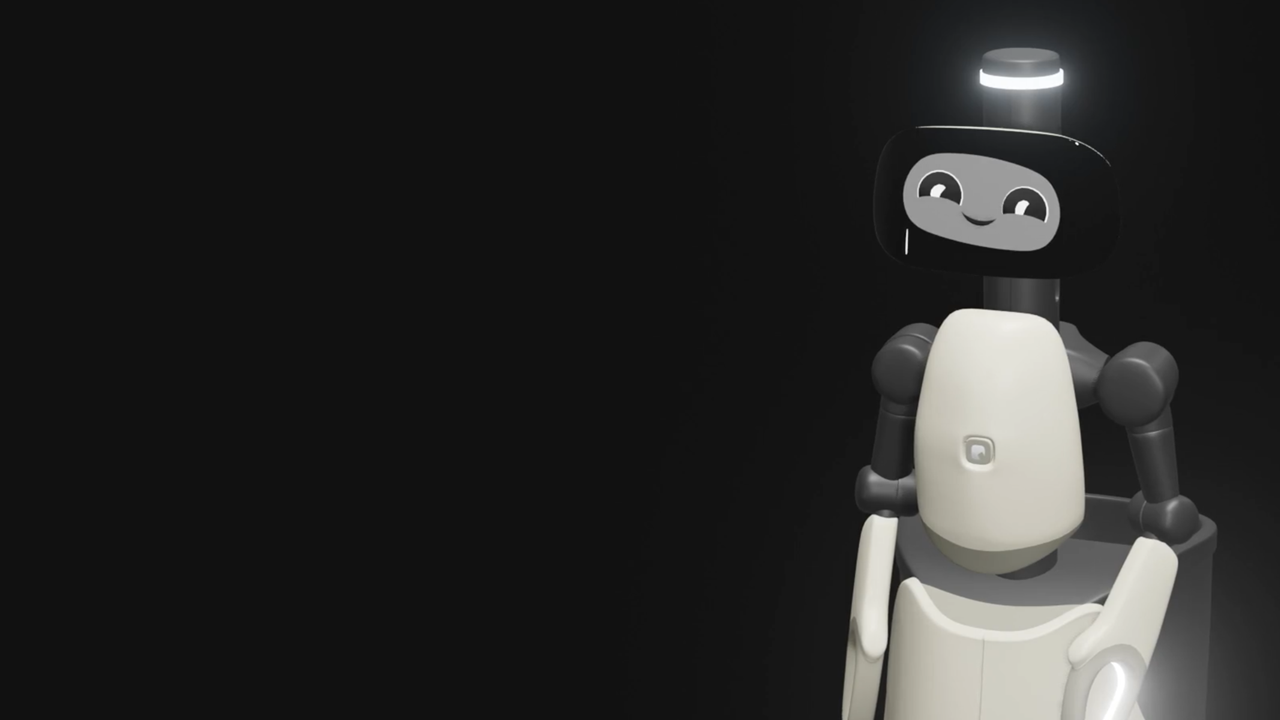

Quori v1
Modular social robot platform for HRI research with projected face and expressive gestures
Deprecated
Deprecated
DESCRIPTION
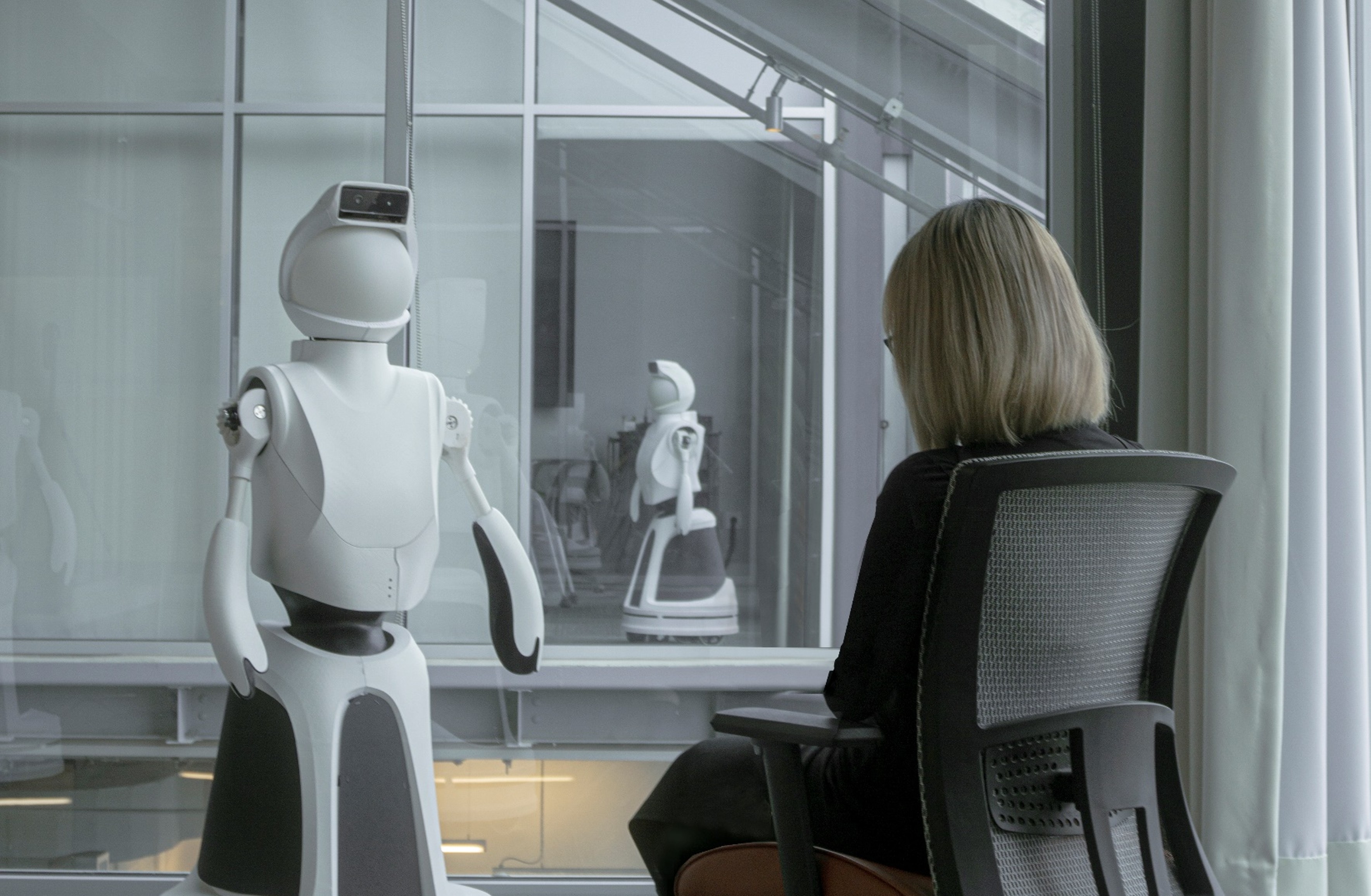
A modular, affordable socially interactive robot platform developed for enabling human-robot interaction research. Features an expressive projected face, gesturing arms with shoulder-like articulation, flexible spine, and omnidirectional mobility.
ORGANIZATIONS
CONTRIBUTORS


Lead:UPenn
Supporting:2 orgs
Contributors:3 people
Category:Social Robot
SPECIFICATIONS
Height
1.35 meters (resting position)
Weight
Approx. 45-50 kg
Battery
Onboard rechargeable battery system
Sensors
Depth camera, RGB camera, Microphone array, Touch sensors, Proximity sensors
Actuators
2 DOF shoulder joints per arm, Omnidirectional base motors, Spine articulation motors, Turret rotation motor
Compute Platform
Intel NUC with ROS integration
KEY FEATURES
Rear-projected animated face for flexible expression design
Two gesturing arms with shoulder-like ball joint articulation (2 DOF each)
Bowing spine mechanism for body language expression
Omnidirectional mobile base (0.8 m/s linear, 180°/s rotational)
Modular panelized design with magnetic attachment system
ROS-based control interfaces at multiple abstraction levels
Browser-based content creation and animation tools
Built-in text-to-speech capabilities
ADA-compliant base dimensions
Low noise operation (quiet at 1 meter distance)
Related Hardware
Explore similar robotic platforms